四向穿梭车是集四向行驶、原地换轨、自动搬运、智能监控等多功能于一体的智能搬运设备,是一种智能机器人,可对货物进行托取、运送、放置等操作,并可与上位系统进行通讯,实现单次存取、连续存取、自动理货等功能,零库自动化四向穿梭车解决方案具有自动化程度高、节省人力和时间、作业方便快捷、提高作业效率等优点。
原地换向:穿梭车通过更换双侧车轮着地情况实现原地换向。
自动充电:当电量低于20%时(参数可设置,由WCS进行充电任务下发),WCS下发充电任务,穿梭车执行充电任务,实现自动充电。
障碍感知:穿梭车四个方向均有障碍物检测雷达,可以检测到面积较大的障碍物。障碍物传感器为点探测雷达,有一定的盲区和局限性。
托盘检测:穿梭车具备托盘有无检测、托盘倾斜检测功能;穿梭车取货前,检测托盘是否倾斜;如托盘倾斜,则向上位机报警,不做取货动作(此功能不适合支腿镂空托盘,故要求托盘支腿不能镂空)。
四向行驶:可在立体货架的交叉轨道上沿纵向或横向轨道任意方向行驶,通过系统所发指令到达仓库任一指定货位。
位置校准:穿梭车到达目的位置时,进行条码校准,实现精确定位。
智能控制:可以实现在线模式和手动操作模式。
休眠功能:小车长时间不使用时,可使用休眠功能,可关闭部分传感器,达到节省电量的目的。
一键唤醒:车辆休眠后,当需要运行的时候,上位机发送唤醒指令,关闭的传感器重新打开,小车可继续工作。
应急电源救援:在穿梭车电池电量不足或不可用情况下,可以使用应急电源,打开刹车,人工移动穿梭车至角落位置,等待维修。
充电检测:若上位机发起充电任务,当穿梭车到达充电桩处,且打开小车内部充电继电器后,可能由于未接触牢固、充电桩未供电等原因,导致未充电,此时穿梭车向上位机上报充电异常信息。
零库四向穿梭车主要结构
四向穿梭车本体由外壳、驱动系统、升降装置、控制系统、动力源组成。
四向穿梭车本体作为接收指令和搬运托盘的主要执行单元,其内部控制系统软件可以根据WCS系统的任务要求,分解成相应的具体指令,完成仓库内对托盘的取、放、存等动作。
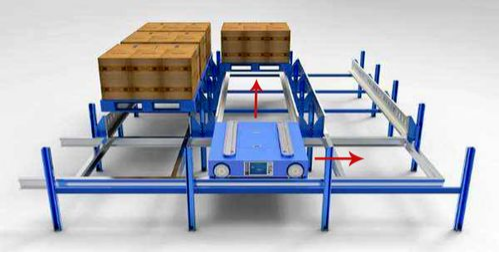
零库四向穿梭车工作方式
穿梭车共配置12个车轮,可实现沿轨道平面四向行驶,通过车体传感器的感知及底层控制系统的控制,自由到达仓库平面上任何一个货位。
1.入库方式
操作人员先确认穿梭车处于在线模式,确保穿梭车处于待命状态;在确认好穿梭车的目的位置后,WCS 会根据穿梭车当前的位置和目的地位置规划好行车路线, WCS 向穿梭车下发入库任务;穿梭车根据收到的入库任务及路径,开始执行;穿梭车在取货位取货后,继续行驶至目的位置;行驶过程中不断扫描条码,确认穿梭车的当前位置并进行校核,实现停车位置的精准定位;穿梭车到达指定的目的位置后,托盘下降,将货物置于货架上,并通知WCS系统放货任务完成;穿梭车继续接收任务或者返回待命区。
2.出库方式
零库四向穿梭车工作原理
直行与换向,通过更换双侧车轮着地情况实现四向行驶。子轨道车轮着地、母轨道车轮悬空时为子通道(巷道)模式,此时穿梭车可在子通道行驶;母轨道车轮着地、子轨道车轮悬空时为主通道(坡道)模式,此时穿梭车可在主通道行驶。通过换向巷道和换向坡道方式,实现穿梭车换向功能。
子通道行驶,子通道行驶定位采用条码定位方式。条码定位:当四向车在子通道内行驶时,穿梭车通过实时扫描斜下方条码,获取当前位置,实现子通道内的精准定位。
主通道行驶,主通道行驶定位采用条码定位方式。条码定位:主通道行驶与子通道行驶方式相同,穿梭车通过实时扫描斜下方条码,获取当前位置,实现穿梭车准确定位。
导向,穿梭车车轮具有导向边,确保穿梭车稳定行驶。
托板升降,穿梭车取货通过托板的上升完成。车驶于子通道内托盘下方,当到达指定位置后,托板顶升,进行取货作业;取货成功后,穿梭车载货行驶至目的位置。放货同理,载货驶入到指定货位后,托板下降,将托盘放置于目的货位。
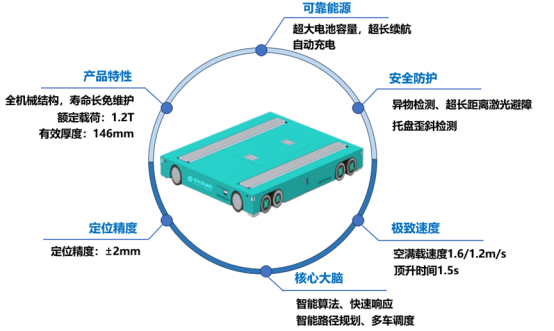
零库四向穿梭车性能说明
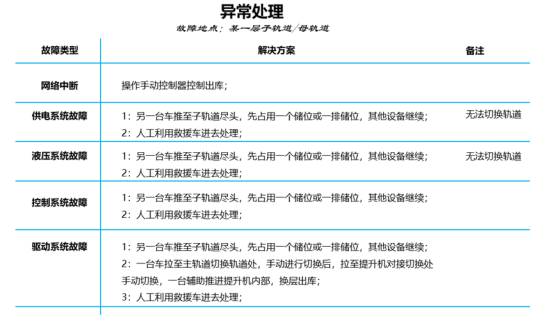
零库四向穿梭车应急预案